
반응형
관성모멘트의 평행축 정리 — 회전축이 바뀌면 왜 관성이 달라질까?
기계나 로봇의 부품이 회전할 때, 그 움직임의 ‘무거움’을 결정짓는 값이 관성모멘트(Moment of Inertia)입니다. 그런데 흥미로운 점은, 같은 물체라도 회전축의 위치에 따라 관성모멘트가 달라진다는 사실입니다. 이를 설명하는 것이 바로 관성모멘트의 평행축 정리(Parallel Axis Theorem)입니다.
평행축 정리의 의미
모든 물체에는 질량 중심(Center of Mass)이 있습니다. 관성모멘트는 보통 이 질량 중심을 기준으로 계산하지만, 실제 기계에서는 회전축이 중심에 위치하지 않는 경우가 많습니다.
예를 들어, 로봇의 팔 링크는 회전축이 한쪽 끝에 있고, 그 질량 중심은 약간 떨어져 있죠.
이때 중심 기준의 관성모멘트만 사용하면 실제보다 작게 계산되어 토크나 에너지 예측이 틀어집니다.
이를 보정하기 위한 식이 바로 다음과 같습니다:
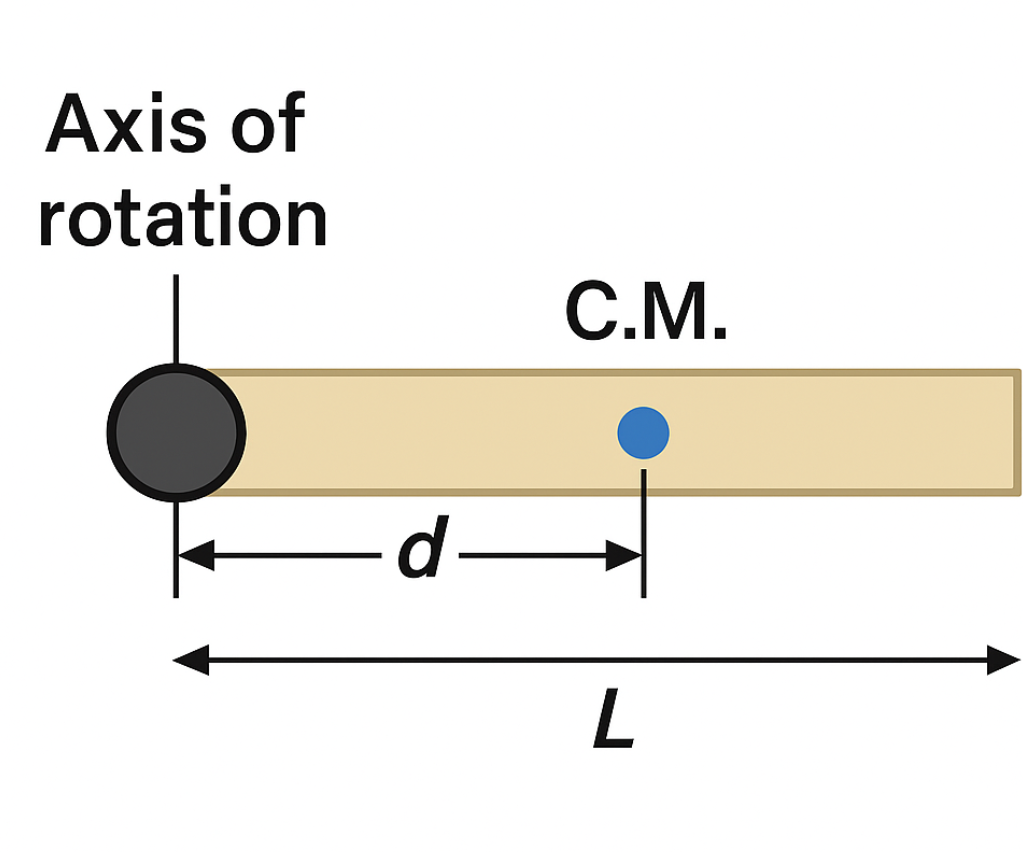
I = I_m + A*d^2
여기서
- ( I_m ): 질량 중심 기준 관성모멘트
- ( d ): 질량 중심과 회전축 사이 거리
즉, 축이 중심에서 멀어질수록 ( A*d^2 )만큼 더 큰 회전저항이 생깁니다.
따라서, “관성모멘트의 평행축 정리”는 회전축이 이동했을 때 물체의 실제 운동특성을 보정하는 필수 수단이며, 로봇공학·기계설계·자동차동역학 등 모든 회전체 분석의 기초가 됩니다.
실제 적용 사례
- 로봇 링크의 동역학 해석: 각 링크의 질량 중심과 조인트 축이 다르므로 반드시 평행축 정리로 보정해야 정확한 토크를 계산할 수 있습니다.
- 엔진 크랭크, 진자 운동: 회전 중심이 질량 중심에서 벗어나 있는 모든 시스템에 적용됩니다.
- 항공기·기계 설계: 회전 부품의 진동 해석, 모터 밸런싱, 구조물 회전 안정성 평가 등에서도 필수 원리입니다.
반응형
'커리어 향상 > 개인공부' 카테고리의 다른 글
| 회로 차단기(Circuit Breaker), 회로 보호기(Circuit Protector)의 차이 (0) | 2024.04.24 |
|---|---|
| 폴리아미드 종류 비교: PA6, PA66, PA11, PA12의 특성 및 응용 분야 (0) | 2024.04.15 |
| 나사고정제, 록타이트 (1) | 2024.03.26 |
| 용접 크랙의 원과 예방 방법 (0) | 2024.01.07 |
| 기계구조용 탄소강 SM20C, SM45C의 특성과 용도 (0) | 2024.01.03 |